Linear Quadratic Regulator
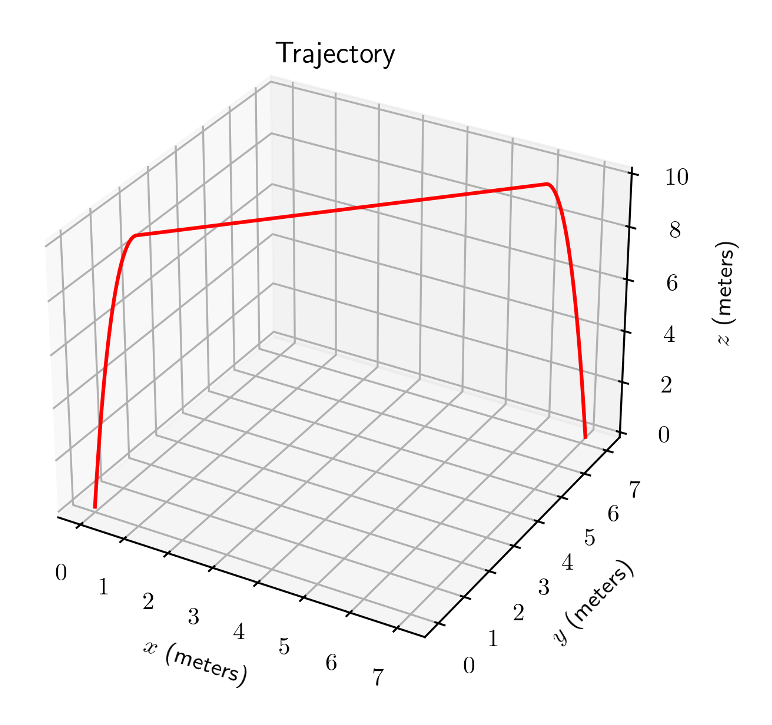
To control our rocket, we use a LQR (Linear Quadratic Regulator) algorithm, using the theory of optimal control to operate a dynamic system at minimum cost. Our code is both in Python for it numerous libraries and C++ for performance.
Kalman Filter
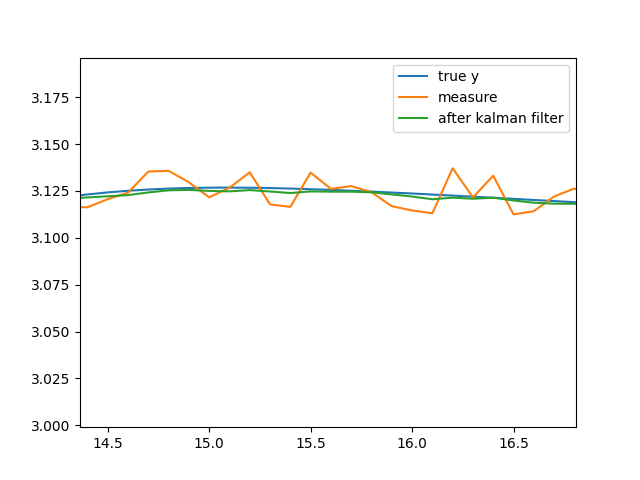
We designed and implemented a Kalman Filter for our rocket. The Kalman filter provides an optimal estimate of how the system is going to change, given noisy measurements and imperfect knowledge about the system.